Modelica unterscheidet in der textuellen Syntax zwischen algorithm und equation.
1 Physikalisch: equation
Topic:.Mdlc.AlgEqu..
Die Equation ist die eigentlich geeignete Form für eine physikalische Simulation. Es wird ein Zusammenhang als Gleichung,
häufig als Differenzialgleichung beschrieben. Die numerische Lösung der Differenzialgleichung über die Zeit liefert dann das
Systemverhalten. Das sei am einfachen Beispiel eines Uhrenpendel dargestellt:
equation
der(v) = f / m;
f = -m * g * sin(angle);
der(angle) = v / l;
Die Ableitung der Geschwindigkeit des Pendels der(v) (der = derivation) ist proportional zur Kraft f, die Masse m muss beschleunigt werden..
Die Kraft ist proportional zur Auslenkung angle, hier tritt wieder die Masse m und die Länge des Pendels l in Erscheinung.
Der Winkel, die Auslenkung angle ergibt sich aus der Geschwindigkeit, die Ableitung des Winkels der(angle) ist die gleich der Winkelgeschwindigkeit v auf die Länge l bezogen.
So die einfachen physikalischen Zusammenhänge. Die Masse kann man aus diesen einfachen Gleichungen herauskürzen. Die Lösung
der Differenzialgleichung ist die Pendelbewegung. Das ist unabhängig von der Abtastzeit einer Simulation und um so besser,
je feiner die Umsetzung der numerischen Lösung erfolgt. Denn: Die Simulation arbeitet letztlich mit einer numerischen Lösung.
Doch dafür ist das Simulationssystem, die Modelica-Codegenerierung verantwortlich.
Man kann diese physikalischen Gleichungen wie gegeben in der Rohform eintippen. Man braucht sie nicht umzustellen, dast macht
die Modelica-Codegenerierung. Es ist auch besser, die Gleichungen nicht umzustellen sondern nahe bei der Vorstellung zu bleiben.
Lass Modelica die Masse herauskürzen! Denn: Die Physik muss gegebenenfalls noch verfeinert werden. Im downloadbaren Modell
(Link am Ende) ist noch eine Reibung über die Geschwindigkeit berücksichtigt, sonst ist die Simulation unrealistisch. Damit
schwingt das System wie in der Realität aus und es braucht zum Dauerschwingen eine Anregung. Diese ist im Folgekapitel beschrieben.
Der Kern des Text-code des gesamten FunctionBlock für das Pendel sieht wie folgt aus:
block pendel_FB "A pendulum as demo"
extends Modelica.Blocks.Icons.Block;
Modelica.Blocks.Interfaces.RealInput u "...
Modelica.Blocks.Interfaces.RealOutput y "...
parameter Real m = 0.1; //mass in kg
parameter Real l = 0.249; //length in m: l = g/(pi*pi) * T*T/4 =~ 0.994 * T*T/4
parameter Real g = 9.81; //gravitation of earth
parameter Real kf = 0.01; //newton per (m/s)*(m/s) for friction
//
Real v; //velocity of pendulum
Real angle(start = 0.1); //The angle of pendulum;
Real fg, ff; //The actual force in direction of pendulum
equation
der(v) = (fg - ff + u)/m; //newtons lore for accelaration, force and mass
fg = (-m * g * sin(angle));
ff = sign(v) * kf * l * 2 * Modelica.Constants.pi * v*v;
der(angle) = v / l; //derivation of angle, the angle velocity and the absolute velocity
y = angle;
annotation(...
Der Text enthält noch Grafikinformationen, die sich im Modelica-Editor ausblenden lassen und auch hier mit ... dargestellt sind.
Bild: Sim-Parameter Mit diesem FunctionBlock allein lässt sich das abkingend schwingende Pendel simulieren und damit kontrollieren, ob die Gleichungen
der bekannten Physik entsprechen. Die Simulation, hier gewählt mit rechtsstehenden Parametern, liefert dann das darunterstehende
Bild:
Das ist eine rein physikalische Betrachtung ohne Beachtung der Tatsache, dass dies auf einem Rechner abargearbeitet werden
soll.
2 Ansteuerung des Pendels
Topic:.Mdlc.AlgEqu..
Das Narrativ zum Beispiel ist eine Uhr, die komplett fertig mit DCF77-Empfangsteil geliefert ist, und aus Retro-Design-Gründen
mit einem Pendel komplettiert werden soll. Im Kleinleistungsprozessor zum Uhrwerk sind je ein Binärein- und ausgang frei,
im 20 ms-Interrupt sind ist noch wenig Speicherplatz verfügbar. Mit diesen Ressourcen soll nun das Pendel zum Dauerschwingen
angeregt werden.
Wenn in unserem Beispiel die Pendelbewegung im Nulldurchgang immer wieder einen kleinen Schubs bekommt, dann ist die Schwingung
dauerhaft. Das ist bei einer mechanischen Uhr mit dem Schliff des Zahnrades am Anker des Pendel, das von einer Feder oder
Gewichten angetrieben wird, im Grunde genommen genauso. Wir sparen aber das Geld für den Uhrmachermeister, der genau schleifen
und justieren muss, und bauen eine billige Elektronik ein.
Der etwaige Nulldurchgang wird mit einem magnetischen Sensor detektiert.
Es wird ein Lagesensor angebracht, hinter der Verkleidung mit Hall-Sensor, der jeweils beim Nulldurchgang des Pendels einen
binären kurzen Impuls abgibt. Damit kann die Synchronisation mit der Pendelbewegung erfolgen.
Als Antrieb wird ein Elektromagnet versteckt angebracht, der im Nulldurchgang mit einen 20 ms-Impuls eine kleine Kraftwirkung
aufbringt. Mehr soll nicht vorgesehen werden.
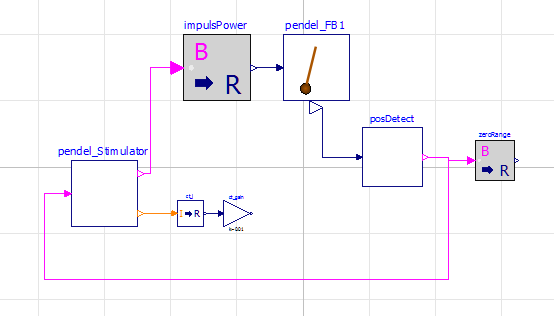
Bild: Pendel-Modell Es wird jetzt ein grafisches Modell gebaut, dass neben dem Pendel-FunctionBlock diese beiden Stell- und Messglieder enthält,
und einen Block, der intern das Mikroprozessorprogramm enthalten soll, und zwar möglichst original.
impulsPower ist ein Modelica-Standard-FBlock mit Binäreingang und parametrierten Real-Ausgang, der die Umsetzung des binären Ausganges
des Prozessors auf die Magnetkraft darstellen soll. posDetect ist ein einfacher Block, der die Winkellage im Bereich bewertet. pendel_Stimulator soll den Softwareinhalt im Mikroprozessor darstellen. Die kleinen nicht angeschlossenen Blöcke sind zur Beobachtung, für
Skalierung.
3 Abarbeitung als Automatisierungssteuerung: algorithm
Topic:.Mdlc.AlgEqu..
Wird nun eine Modellierung unmittelbar für eine Softwarelösung gesucht, dann kommt es darauf an. Häufig steht nicht die Physik
im Vordergund, sondern unmittelbar die Softwarelösung. Will man diese direkt wie in C(++) programmieren, dann sind physikalische
Gleichungen der falsche Ansatz. In der Software geht es immer um Zuweisungen (assignment statements). In C schreibt man nur
ein =, meint aber die Zuweisung die in anderen Programmiersprachen auch deutlicher mit := notiert wird, so auch in Modelica.
Im Beispiel soll die Modellierung im FBlock pendel_Stimulator nahe am C-Code liegen. Es ist im Kern ein Zähler enthalten, der als 8-bit-Speicherplatz Zustand und Timing geschickt kombiniert
enthält. Diese Lösung ist im Modelica-FBlock in Modelica-Language ausprogrammiert und kann manuell direkt in C umgesetzt werden.
Die funktionalen Inhalte dieses Blocks sind:
block pendel_Stimulator_FB "Pendula stimuli"
import Modelica.Blocks;
import Modelica.Blocks.Interfaces;
extends Modelica.Blocks.Icons.Block;
Modelica.Blocks.Interfaces.BooleanInput zeroCrossing "...
Modelica.Blocks.Interfaces.BooleanOutput impuls "...
Modelica.Blocks.Interfaces.IntegerOutput cto "...
Integer ct;
parameter Integer ctRange = 5; //range where the ct is proper for impuls
parameter Integer ctPeriod = 50; //period for ct adequat to step time and pendulum period
algorithm
when initial() then
impuls := false;
end when;
when sample(0, 0.02) then
if( not zeroCrossing and ct >=5) then //the end of the zerocrossing signal:
ct := div(ct - ctRange, 2) //middle value of zeroCrossing width
- ctPeriod + ctRange; //set to negativ value (-45)
end if;
//
if(ct ==(ctPeriod + ctRange) and zeroCrossing) then
ct := ctRange; //counter reset to start in positive range
impuls := true; //impuls without knowledge of pendula position
//
elseif(ct <ctRange and ct > -ctRange and zeroCrossing) then
ct := ctRange; //counter about 0, and zeroCrossing
impuls := true; //synchronized impuls
else
impuls := false;
end if;
ct := ct +1;
cto := ct;
end when;
annotation(.....
end pendel_Stimulator_FB;
Dieser Block enthält keine equation, dafür algorithm. Die when-Klauseln sind entscheidend:
when initial() then
... Initialisierungsfunktion
when sample(0, 0.02) then
... 20 ms Abtastzeit
Hinweis: Der erste Parameter des sample(...) ermöglicht eine Unterteilung einer Abtastscheibe, was bei untersetzten Abtastzeiten zur Verteilung der Rechenzeit nützlich
ist, hier aber nicht benutzt.
Der Algorithmus ist am Modell erarbeitet. Es ist ein wenig tricky: Wenn das Null-Lage-Signal zeroCrossing dauerhaft ansteht, dann steht das Pendel oder es ist eine sehr kleine Bewegung. Dann liegt der Zähler im positiven Bereich
und liefert alle 50 Takte (= 1 sec) einen Kurzimpuls. Wenn das zeroCrossing false wird, also das Pendel außerhalb der Ruhelage gerät, dann wird der Counter auf etwa -45 gesetzt, genauer getuned mit
dem aktuellen Zählerstand. Damit wird ein breiteres Null-Lage-Signal richtig behandelt. Erst wenn der Zähler dann den Bereich
von -5..5 erreicht, führt ein Null-Lage-Signal zur Ausgabe des Pendelimpulses. Die Null-Lage kommt zweimal, auch bei der Rückwärtsbewegung.
Ein Fehlimpuls wird damit unterdrückt, dass der Zähler ct dann etwa bei -25 steht.
Man kann am Modell einige Bedingungen ausprobieren, insbesondere ein nicht genau abgestimmtes Pendel. Wegen der Synchronisation
mit dem Nullimpuls schwingt dies mit seiner Eigenfrequenz im Bereich ca. +/- 10%. Wenn die Schwingung des Pendels zu groß
wird (etwa 0.2 radiant = 10°), dann wird das Null-Lage-Signal schmaler als 20 ms und wird daher häufiger nicht mehr erkannt.
Das ist so vorgesehen. Es gibt dann Schwingungen ohne Zusatzimpuls, bis die Pendelamplitude wieder abklingt. Das fällt für
den Betrieb optisch kaum auf. Dieses Verhalten ergibt sich aufgrund der einfachen Hardware und ist vollkommen ausreichend.
4 Wann algorithm und wann equation, kann man mischen?
Topic:.Mdlc.AlgEqu..
Die Antwort ist recht einfach:
Physikalisch zu modellierende Teile sollten mit equation programmiert werden. Die grafische Zusammenschaltung von Blöcken mit equation-Anteilen ist eine Gesamt-Equation.
Teile, die direkt für die Software realisiert werden, sollten direkt als algorithm geschrieben werden, da dann die Simulation so arbeitet wie nachher die reale Welt im Prozessor. Es sei denn, man möchte eine
reale Welt im Prozessor abbilden, will daher im Prozessor eine angepasste Solver-Lösung entsprechend der Modelica-Codegenerierung
unterbringen und hat dafür die notwendigen Rechenzeitressourcen.
Es ist nicht zielführend, die Simulation erstmal mit Equation und beliebiger Abtastzeit in dem Blöcken auszuführen, die dann
später in einer bestimmten Abtastzeit möglichst effektiv ablaufen sollen. Hier ist der Blick auf das Ziel besser als eine
dann nicht praktizierte Theorie.
Will man als theoretische Vorarbeit untersuchen, wie genau eine einfache Lösung auf einen Prozessor den theoretischen Notwendigkeiten
nahekommt, dann ist selbstverständlich beides in parallelen FunctionBlocks zum Vergleich angebracht.
Man kann mischen.
5 Download-Example
Topic:.Mdlc.AlgEqu..
../Download klappt als File-Directory auf, dort pendel_2019.....zip entpacken und in OpenModelica laden.
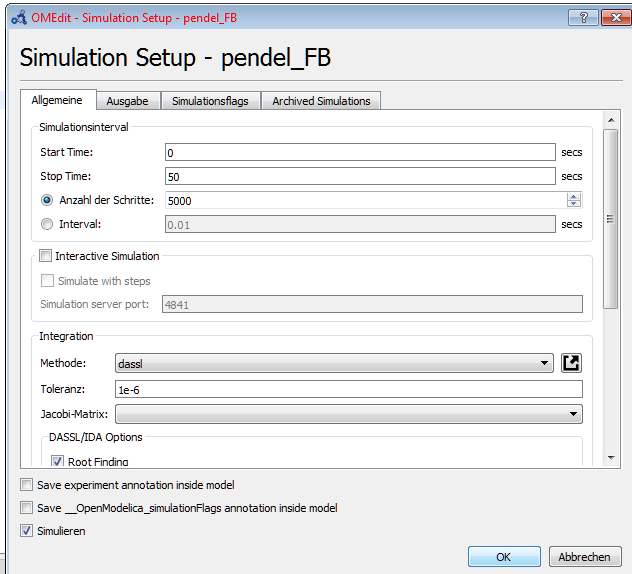 Bild: Sim-Parameter Mit diesem FunctionBlock allein lässt sich das abkingend schwingende Pendel simulieren und damit kontrollieren, ob die Gleichungen
der bekannten Physik entsprechen. Die Simulation, hier gewählt mit rechtsstehenden Parametern, liefert dann das darunterstehende
Bild:
Bild: Sim-Parameter Mit diesem FunctionBlock allein lässt sich das abkingend schwingende Pendel simulieren und damit kontrollieren, ob die Gleichungen
der bekannten Physik entsprechen. Die Simulation, hier gewählt mit rechtsstehenden Parametern, liefert dann das darunterstehende
Bild: